







When it comes to an autonomous truck driving on the interstate, there are several issues that need to be solved. The lidar arrays used to sense the environment and map a truck’s location are very expensive. And there is the question of how a vehicle gets updated maps. Does it store it in the truck? Or does it download the maps? Both approaches have drawbacks. Finally, lidar and cameras don’t work well in all environmental conditions.
The last of these problems, being able to drive autonomously in all conditions, appears to be well on the way to being solved. Currently, autonomous vehicles rely on three means of location: GPS, lidar, and camera image processing. GPS is dependent on a good connectivity; it’s also not accurate enough at highway speeds for precise localization. Lidar and cameras are useless in heavy rain and snow. Even fog or unexpected ground cover, like leaves on the ground, or poor lane markings can cause problems.
Ground Penetrating Radar Improves Autonomous Truck Navigation
A startup called WaveSense (founded in 2017) is commercializing ground penetrating radar developed for the military at MIT Lincoln Laboratory that can be used for autonomous vehicle positioning in these environmental conditions. WaveSense is the exclusive worldwide licensee of the MIT-owned patents relating to localizing ground penetrating radar. I talked to Tarik Bolat, the CEO at WaveSense, about ground penetrating radar. I also got his point of view, an insider in the world of autonomous vehicles, on the other issues.
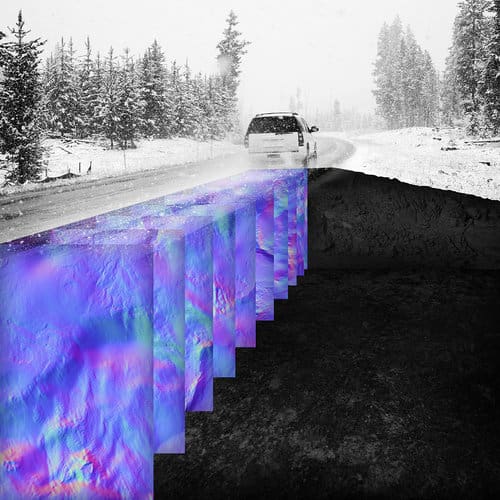
Ground-penetrating radar (GPR) bolted underneath a chassis behind the two front wheels can scan up to 10 feet beneath the ground. It looks at the soil density, and the location of pipes, cavities, roots, rocks and other larger and more stable features that are unlikely to change over time. The scans, 126 per second, create images that can be used to create a high definition map.
If you are mapping with lidar and cameras, you also have the changeable environment problem. Mr. Bolat explained, “You are really dependent on a stable surface. The foliage on trees when it is mapped, the level of clarity and continuity of lane markings, and the visibility of above ground structures such as signs and buildings can create instability for vehicle positioning. Subterranean maps created with GPR are unique, stable, almost always available, and uncorrelated with surface features so enable an autonomous vehicle to navigate in all of these common but challenging conditions.”
When it comes to an autonomous truck navigating on interstates in the West, the sparse landmark problem becomes a problem. There may be long stretches of road without enough trees, signs, rocks and other features to map against.
“If you drive down route 280, GPR creates a map. You can then turn around and use that map,” Mr. Bolat explained. “When we create the map, it is a relatively light amount of data.” The ground penetrating radar map is much less data intensive than LIDAR and camera maps. “We search the map for a positioning match based on the rough GPS location and the speed of the vehicle.” Once a GPR has scanned an entire roadway, it creates a map of the subsurface strata that can determine the location of a vehicle within a few centimeters.
Lidar arrays for autonomous vehicles currently sells for about $75,000 per vehicle, where the WaveSense solution is expected to go for less than $100 as volumes pick up. But Mr. Bolat does not see his solution as a replacement for expensive lidar solutions, even there are those in the autonomous vehicle community trying to get rid of it. For safety, independent layers are necessary. But the expectation is that when lidar is produced at scale, there will be dramatic price decreases. In short, the WaveSense solution will complement existing solutions, and the ground penetrating radar map will be an additional data layer that can augment LIDAR and camera maps.
An Autonomous Truck Will Not be Fully Viable Until Other Problems are Solved
So, one problem largely solved, but when it comes to autonomous trucks moving freight across the country, there are other problems that need solutions.
Trucks can’t operate solely on a highway. They must exit the interstate to make deliveries to their customers. The business model, Mr. Bolat said, will initially be “on ramp to off ramp.” This is Embark Trucks business model. Drivers will meet the trucks, at a big parking lot near and exit, and drive the final miles. But clearly, today, we don’t have enough of these kinds of lots near all the interstate exits. Making autonomous trucking a reality is likely to require state and federal funding to build these kinds of facilities.
One of the issues to be solved revolves around the question of how a vehicle gets updated maps. Are the maps store it in the truck? Or does the truck download the maps? If the former, how can a truck computer hold all the incredibly data intensive maps autonomous vehicles depend on for all the interstates? If the latter, we will need high speed 5G networks for data intensive downloads. These networks are not targeted to arrive in the U.S. until at least 2020; and probably will arrive years later.
Swapping storage devices with the right maps on them can work well for big truck companies that drive established routes to their large shipper clients. But Mom and Pop operators often pick up new brokered shipments while they are on the road. They often do not know on Tuesday where they will be off to on Thursday. This is an incredibly fragmented market where the top 15 carriers account for less than 12 percent of the total for-hire market. Of the 580,000 for-hire common carriers in the U.S. almost 91 percent operate with six or fewer trucks.
As we brainstormed this issue, it occurred to us that the truck stops that we will need near highway exits could have kiosks where these maps could be downloaded. A first mile driver will drive the truck to the exit, download the route map data onto a memory stick, pop it in the truck, and press GO.
The problems are not trivial. But Mr. Bolat believes that within two or three years, the on-ramp to off-ramp form of autonomous freight trucking can become a reality, at least on some routes.
Leave a Reply