







 Ten years ago, an ARC Advisory Group colleague described the China residential telecommunications landscape to me as one that advanced from traditional in-person communication (think Rocky Balboa saying “I’ll just call you…I’ll go ‘Hey yo!’”) directly to cellular networks – virtually skipping the entire 20th century paradigm of landline telephone communications. Of course, this was an exaggeration, but it illustrated his point well. “You don’t see suburban roads lined with telephone polls and wires strung between them like you do in the US,” he explained. And for good reason. It doesn’t make sense to network a community in that way if you were to start from scratch today. Cellular networks are much more practical and offer much greater flexibility to the end user. Of course, fiber optic land lines offer greater bandwidth. But bandwidth is one dimension. Sufficient bandwidth can often be obtained from cellular networks without the intrusive, omnipresent infrastructure of above-ground landline networks. I see a similar paradigm playing out in the warehouse automation landscape of China. Traditional “bolted-down” automation is the landlines in this paradigm. Sure, it may have higher throughput (bandwidth) than warehouse robotics, but robotics offers benefits in other forms – greater flexibility and faster time-to-value.
Ten years ago, an ARC Advisory Group colleague described the China residential telecommunications landscape to me as one that advanced from traditional in-person communication (think Rocky Balboa saying “I’ll just call you…I’ll go ‘Hey yo!’”) directly to cellular networks – virtually skipping the entire 20th century paradigm of landline telephone communications. Of course, this was an exaggeration, but it illustrated his point well. “You don’t see suburban roads lined with telephone polls and wires strung between them like you do in the US,” he explained. And for good reason. It doesn’t make sense to network a community in that way if you were to start from scratch today. Cellular networks are much more practical and offer much greater flexibility to the end user. Of course, fiber optic land lines offer greater bandwidth. But bandwidth is one dimension. Sufficient bandwidth can often be obtained from cellular networks without the intrusive, omnipresent infrastructure of above-ground landline networks. I see a similar paradigm playing out in the warehouse automation landscape of China. Traditional “bolted-down” automation is the landlines in this paradigm. Sure, it may have higher throughput (bandwidth) than warehouse robotics, but robotics offers benefits in other forms – greater flexibility and faster time-to-value.
Robotics Adoption, ROI, and the Status Quo
My colleague Fox Chen and I are a month into ARC Advisory Group’s research update on the mobile warehouse robotics market. The data is just beginning to form a picture and the details of that picture are sure to change as we progress. However, at this point it appears that mobile warehouse robotics adoption has accelerated rapidly in China. This is surprising because logistics technology adoption has historically occurred initially in North America and Western Europe, and then other economies adopt the technology after a substantial time lag.
I attribute the rapid adoption of mobile warehouse robotics in China to three factors:
-
- Global rapid technology diffusion
- China’s explicit emphasis on digitization (see 14th Five-Year Plan)
- ROI and the Status Quo
Rapid Technology Diffusion
As a general rule, technology diffusion in both product development and adoption is extremely rapid and widespread. In today’s world, information is disseminated faster than ever, and the trade of physical goods is extremely widespread as well. However, I believe that the rapid exchange of information has allowed companies to innovate and replicate at a much faster pace than in the recent past. This is particularly true for mechatronics that can be reverse engineered more readily than software code. Many executives of warehouse robotics companies to whom I have spoken inform me that they view the software intelligence of their robotics systems as the true strategic differentiators in their offerings.
China’s Five-Year Plan and Digitization
China as a country has chosen digitization as a core tenet of the country’s Five-Year Plan. And digitization projects with the manufacturing sector are a part of that tenet. Although I do not have formal confirmation, I believe that warehouse robotics may be an area where China’s government is supporting research and development efforts to accelerate the country’s competitiveness. Government subsidies would certainly support domestic development of warehouse robotics. However, China is also transitioning from an export country to a more balanced economy with increasing levels of domestic consumption. Most examples of warehouse robotics adoption in China are at operations in support of domestic consumption and these examples are predominantly consumer goods retail fulfillment operations.
Retail Fulfillment, ROI, and the Status Quo
Retailers, producers and distributors of consumer goods, and logistics service providers supporting retail clients are the three industries in China that appear to be adopting warehouse robotics most rapidly. Furthermore, most of this is adoption of robotics from domestic Chinese providers. I believe that Chinese retail and fulfillment operations are adopting mobile warehouse robotics so rapidly because of the paradigm that was also present in communications networks a decade ago – growth in demand driving a need for a technology solution in a landscape without widespread legacy automation in place. There are limited situations where existing automation can receive incremental updates that provide substantial benefits.
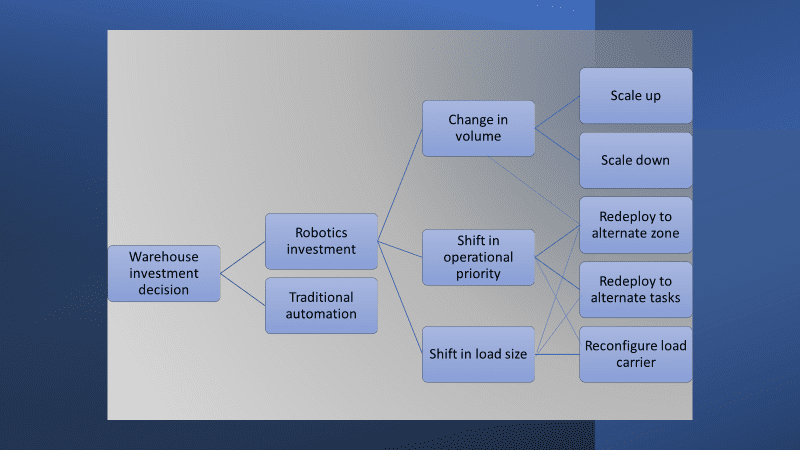
These warehouse operations are looking for substantial performance improvements over the status quo. And warehouse robotics offer throughput increases with lower capital costs, quicker time to value, and greater flexibility than many traditional forms of automation. The return on investment (ROI) decision is substantially different in these situations than it is in operations with existing bolted-down automation.
Mobile Warehouse Robotics Market Implications
There are many implications of the rise in mobile warehouse robotics development and adoption in China. For potential customers of robotics, China-based providers may offer a solution that is a good fit for your requirements. For mobile warehouse providers, the total addressable market in China may be much larger than I (and possibly you) would have anticipated. For me, this is due to the fact that I did not previously consider the impact of legacy automation installations (and the lack thereof in China) and the impact this factor has on the decision-making process and the benefit to mobile warehouse robotics adoption. Furthermore, the rapid increase in autonomous case handling robots (HAI Robotics and others) is serving as a substitute for warehouse operations in search of storage density and case handling automation, addressing an addition segment of the market.








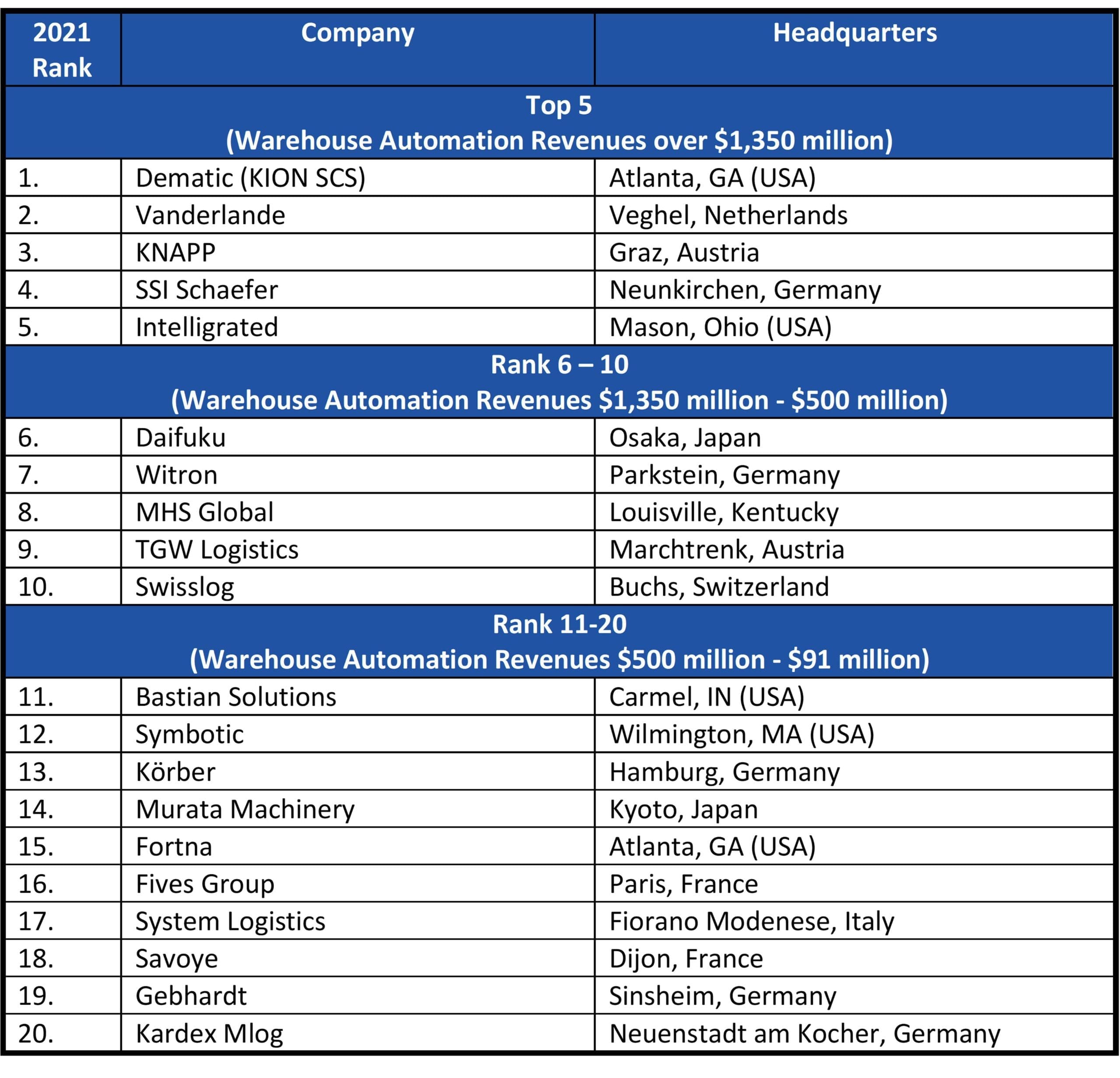
 VANDERLANDE was the world’s second largest warehouse automation supplier in 2021, according to ARC’s analysis. Vanderlande is a member of Toyota Industries Corporation within the Toyota Advanced Logistics Group. Vanderlande targets two high-level markets within the broader warehouse automation market – parcel and warehousing. The company has a long history and a strong presence in parcel center automation, including sites for major providers such as
VANDERLANDE was the world’s second largest warehouse automation supplier in 2021, according to ARC’s analysis. Vanderlande is a member of Toyota Industries Corporation within the Toyota Advanced Logistics Group. Vanderlande targets two high-level markets within the broader warehouse automation market – parcel and warehousing. The company has a long history and a strong presence in parcel center automation, including sites for major providers such as SSI SCHAEFER was the world’s fourth largest warehouse automation supplier in 2021, according to ARC’s analysis. SSI Schaefer is a privately-held company that offers a broad range of warehouse automation systems, enabling it to offer end-to-end automation solutions. These capabilities, in conjunction with its scale, make SSI Schaefer one of the suppliers most capable of taking on large-scale integrated, multi-year warehouse automation projects. A few years ago, SSI Schaefer developed a large scale omni-channel fulfillment center for
SSI SCHAEFER was the world’s fourth largest warehouse automation supplier in 2021, according to ARC’s analysis. SSI Schaefer is a privately-held company that offers a broad range of warehouse automation systems, enabling it to offer end-to-end automation solutions. These capabilities, in conjunction with its scale, make SSI Schaefer one of the suppliers most capable of taking on large-scale integrated, multi-year warehouse automation projects. A few years ago, SSI Schaefer developed a large scale omni-channel fulfillment center for  INTELLIGRATED was the world’s fifth largest warehouse automation supplier in 2021, according to ARC’s analysis. Intelligrated is a business unit of the Safety and Productivity Solutions (SPS) segment of Honeywell. As a publicly-traded company, Honeywell reports its financial results on a regular basis. The company stated that Intelligrated experienced growth of approximately 50 percent in 2021 but expects 2022 sales to be roughly flat. Intelligrated has a long history and a large installed based on conveyor and high-speed sortation systems. The company’s broad portfolio of high-performance sortation systems and ability to scale has enabled the company to obtain substantial business in parcel sortation centers and other large-scale warehouse automation projects. One of Intelligrated’ s prominent, publicly-stated projects is an
INTELLIGRATED was the world’s fifth largest warehouse automation supplier in 2021, according to ARC’s analysis. Intelligrated is a business unit of the Safety and Productivity Solutions (SPS) segment of Honeywell. As a publicly-traded company, Honeywell reports its financial results on a regular basis. The company stated that Intelligrated experienced growth of approximately 50 percent in 2021 but expects 2022 sales to be roughly flat. Intelligrated has a long history and a large installed based on conveyor and high-speed sortation systems. The company’s broad portfolio of high-performance sortation systems and ability to scale has enabled the company to obtain substantial business in parcel sortation centers and other large-scale warehouse automation projects. One of Intelligrated’ s prominent, publicly-stated projects is an  DAIFUKU is a publicly traded company with over 12,000 employees. The company’s primary business is the design, manufacture, and installation, and service of material handling equipment and logistics systems. Daifuku provides material handling equipment to warehouse environments and to environments external to warehousing (manufacturing lines, semiconductor clean rooms, airport baggage handling). In 2013, Daifuku acquired Wynright, a US-based provider of warehouse automation and material handling systems. The company is vertically integrated, offering numerous internally developed subsystems, handling load sizes from small to pallet, allowing it to serve as a general contractor for large-scale warehouse automation projects, such as the recent one for
DAIFUKU is a publicly traded company with over 12,000 employees. The company’s primary business is the design, manufacture, and installation, and service of material handling equipment and logistics systems. Daifuku provides material handling equipment to warehouse environments and to environments external to warehousing (manufacturing lines, semiconductor clean rooms, airport baggage handling). In 2013, Daifuku acquired Wynright, a US-based provider of warehouse automation and material handling systems. The company is vertically integrated, offering numerous internally developed subsystems, handling load sizes from small to pallet, allowing it to serve as a general contractor for large-scale warehouse automation projects, such as the recent one for  WITRON is a privately-held company with approximately 5,100 employees. Witron is especially strong in the development of large-scale, highly automation warehouses for customers in the food and beverage value chain, including manufacturers, distributors, and grocers. A couple of recent projects include METRO’s selection of Witron for a facility in the greater Montreal area and a contract with Migros’ distribution company Neuendorf AG (MVN AG). However, Witron also conducts business outside of food and beverage, such as the development of a global distribution center for
WITRON is a privately-held company with approximately 5,100 employees. Witron is especially strong in the development of large-scale, highly automation warehouses for customers in the food and beverage value chain, including manufacturers, distributors, and grocers. A couple of recent projects include METRO’s selection of Witron for a facility in the greater Montreal area and a contract with Migros’ distribution company Neuendorf AG (MVN AG). However, Witron also conducts business outside of food and beverage, such as the development of a global distribution center for  TGW LOGISTICS is a privately-held (foundation-owned) company with more than 4,000 employees. TGW is especially well-established in the EMEA region. From an industry perspective, the company is focused on fashion and apparel, grocery, and industrial and consumer goods. TGW’s has many prominent customer projects including a 1,700,000 square foot
TGW LOGISTICS is a privately-held (foundation-owned) company with more than 4,000 employees. TGW is especially well-established in the EMEA region. From an industry perspective, the company is focused on fashion and apparel, grocery, and industrial and consumer goods. TGW’s has many prominent customer projects including a 1,700,000 square foot  BASTIAN SOLUTIONS is a member of Toyota Industries Corporation within the Toyota Advanced Logistics Group. Bastian Solutions began and grew from its roots in the Mid-Western US to an international company. Its solutions include internally developed systems and a wide-array of third-party systems to bet meet customer needs. Bastian has rapidly grown to become a leading AutoStore distribution and implementation partner. Some of Bastian’s notable client projects include a Puma facility in California with an AutoStore grid that can hold 305,000 bins and a
BASTIAN SOLUTIONS is a member of Toyota Industries Corporation within the Toyota Advanced Logistics Group. Bastian Solutions began and grew from its roots in the Mid-Western US to an international company. Its solutions include internally developed systems and a wide-array of third-party systems to bet meet customer needs. Bastian has rapidly grown to become a leading AutoStore distribution and implementation partner. Some of Bastian’s notable client projects include a Puma facility in California with an AutoStore grid that can hold 305,000 bins and a  KORBER is a privately-held (foundation-owned) company. The Korber Supply Chain business includes warehouse automation subsidiaries Körber Supply Chain Software (formerly inconso GmbH), Körber Supply Chain Automation GmbH (formerly Aberle), and the formerly-named Consoveyo. Korber Supply Chain Software provides a warehouse control system that has been implemented and utilized at numerous automated warehouses. Korber Supply Chain Automation Gmbh is a systems integrator and general contractor of projects for automated intralogistics systems. The former Consoveyo is a system integrator for warehouse automation projects and a supplier of automated conveyor and storage systems.
KORBER is a privately-held (foundation-owned) company. The Korber Supply Chain business includes warehouse automation subsidiaries Körber Supply Chain Software (formerly inconso GmbH), Körber Supply Chain Automation GmbH (formerly Aberle), and the formerly-named Consoveyo. Korber Supply Chain Software provides a warehouse control system that has been implemented and utilized at numerous automated warehouses. Korber Supply Chain Automation Gmbh is a systems integrator and general contractor of projects for automated intralogistics systems. The former Consoveyo is a system integrator for warehouse automation projects and a supplier of automated conveyor and storage systems. FIVES is a privately-held industrial engineering group that designs and manufactures machines, process equipment and production lines. The Smart Automation Solutions business of Fives designs, manufactures and installs high-speed sorting systems and high added value handling and automation solutions for the e-commerce, distribution and general industry sectors. Fives obtains a large percentage of its warehouse automation business from parcel and other logistics providers such as
FIVES is a privately-held industrial engineering group that designs and manufactures machines, process equipment and production lines. The Smart Automation Solutions business of Fives designs, manufactures and installs high-speed sorting systems and high added value handling and automation solutions for the e-commerce, distribution and general industry sectors. Fives obtains a large percentage of its warehouse automation business from parcel and other logistics providers such as  GEBHARDT is a family-run company, consisting of Gebhardt Fördertechnik, Gebhardt Systems, and other regional subsidiaries. Gebhardt’s shuttle system, the OLS Shuttle, is deployed in client sites directly by Gebhardt and through resellers in third-party projects. Gebhardt also develops its Storebiter load handling devices (hybrid shuttle/AGV), pallet AS/RS systems, and a suite of warehouse software. Some of Gebhardt’s notable clients include Miele,
GEBHARDT is a family-run company, consisting of Gebhardt Fördertechnik, Gebhardt Systems, and other regional subsidiaries. Gebhardt’s shuttle system, the OLS Shuttle, is deployed in client sites directly by Gebhardt and through resellers in third-party projects. Gebhardt also develops its Storebiter load handling devices (hybrid shuttle/AGV), pallet AS/RS systems, and a suite of warehouse software. Some of Gebhardt’s notable clients include Miele, 